FreeRTOS
官网:FreeRTOS官网
1. FreeRTOS概述
FreeRTOS是一个迷你(mini)的实时操作系统内核。作为一个轻量级的操作系统,功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程(线程)等,可基本满足较小系统的需要。
实时操作系统(RTOS-Real Time Operating System)中实时(Real Time)指的是任务(Task)或者说实现一个功能的线程(Thread)必须在给定的时间(Deadline)内完成。-------抢占性的。 非实时(Linux windows)是时间片轮换。
由于RTOS需占用一定的系统资源(尤其是RAM资源),只有μC/OS-II、embOS、salvo、FreeRTOS等少数实时操作系统能在小RAM单片机上运行。相对μC/OS-II、embOS等商业操作系统,FreeRTOS操作系统是完全免费的操作系统,具有源码公开、可移植、可裁减、调度策略灵活的特点,可以方便地移植到各种单片机上运行
2. FreeRTOS的优势
- 开源和免费:FreeRTOS是一款开源的RTOS,采用MIT许可证发布,可以免费使用、修改和分发。
- 轻量级设计:FreeRTOS注重轻量级设计,适用于资源受限的嵌入式系统(stmf103c8t6-20kb),不占用过多内存和处理器资源。
- 广泛应用:FreeRTOS在嵌入式领域得到广泛应用,包括工业自动化、医疗设备、消费电子产品、汽车电子等。
- 多平台支持:FreeRTOS的设计注重可移植性,可以轻松地移植到不同的硬件平台,支持多种处理器架构。
- 功能丰富:提供了多任务调度、任务通信、同步等功能,适用于复杂的嵌入式应用场景。
- 具有抢占式或时间片轮换的实时操作系统内核
- 功能可裁剪,最小占用10Kb左右的ROM空间,0.5Kb的RAM空间
- 灵活的任务优先级分配
- 具有低功耗模式
- 有互斥锁、信号量、消息队列等任务之间通讯机制
- 运行过程可追踪
- 支持中断嵌套
3. FreeRTOS移植(重点 ,针对标准库)
其实freerots相当于是一个三方库,需要集成源码到我们的单片机代码中,编译一个带有freertos源码功能的程序烧录到板子里面去。
3.1 源码获取
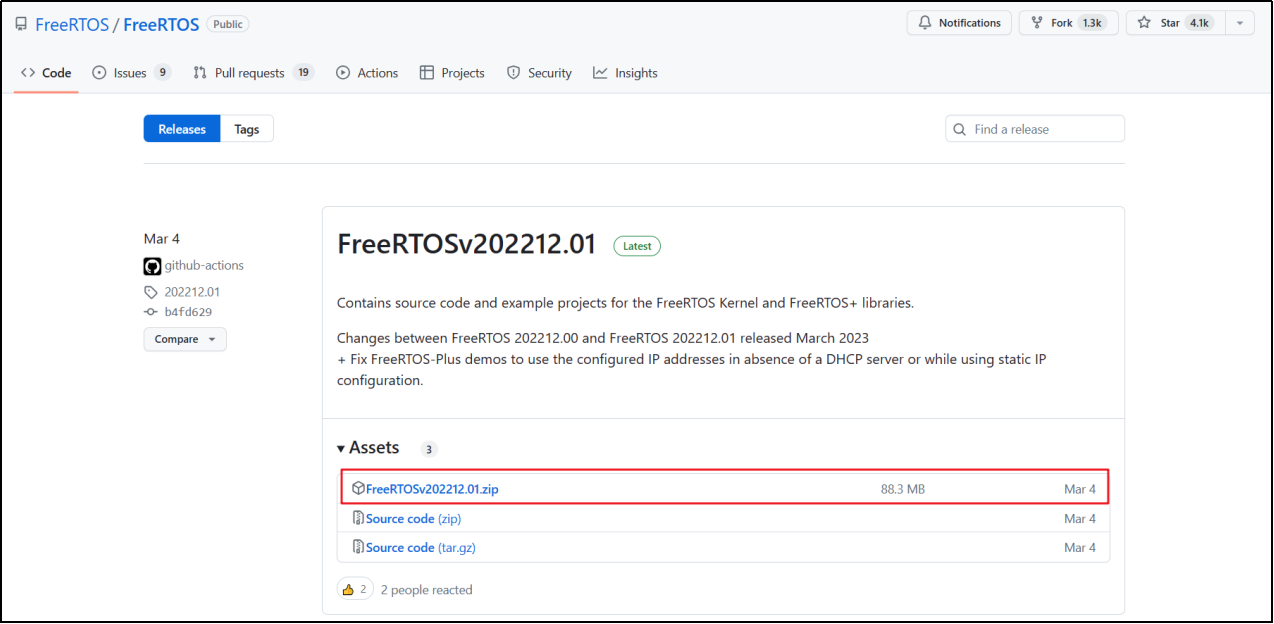
- 官网下载

当前选择的是202212.01版本
- GitHub下载
Github地址:Github地址
3.2 源码结构
- 整体结构
| 名称 | 描述 |
|---|---|
| FreeRTOS | FreeRTOS内核 |
| FreeRTOS-Plus | FreeRTOS组件,一般我们会选择使用第三方的组件 |
| tools | 工具 |
| GitHub-FreeRTOS-Home | FreeRTOS的GitHub仓库链接 |
| Quick_Start_Guide | 快速入门指南官方文档链接 |
| Upgrading-to-FreeRTOS-xxx | 升级到指定FreeRTOS版本官方文档链接 |
| History.txt | FreeRTOS历史更新记录 |
| 其他 | 其他 |
- 文件夹结构
| 名称 | 描述 |
|---|---|
| Demo | FreeRTOS演示例程,支持多种芯片架构、多种型号芯片 |
| License | FreeRTOS相关许可 |
| Source | FreeRTOS源码,最重要的文件夹 |
| Test | 公用以及移植层测试代码 |
其中要移植的文件在Source文件夹下
- Source文件夹结构
| 名称 | 描述 |
|---|---|
| include | 内包含了FreeRTOS的头文件 |
| portable | 包含FreeRTOS移植文件:与编译器相关、keil编译环境 |
| croutine.c | 协程(线程)相关文件 |
| event_groups.c | 事件相关文件 |
| list.c | 列表相关文件 |
| queue.c | 队列相关文件 |
| stream_buffer.c | 流式缓冲区相关文件 |
| tasks.c | 任务相关文件 |
| timers.c | 软件定时器相关文件 |
着重注意
include 、portable、event_groups.c、list.c、queue.c、tasks.c、timers.c文件为必须移植文件
portable文件夹下内容要根据编译器和内核的实际情况选取
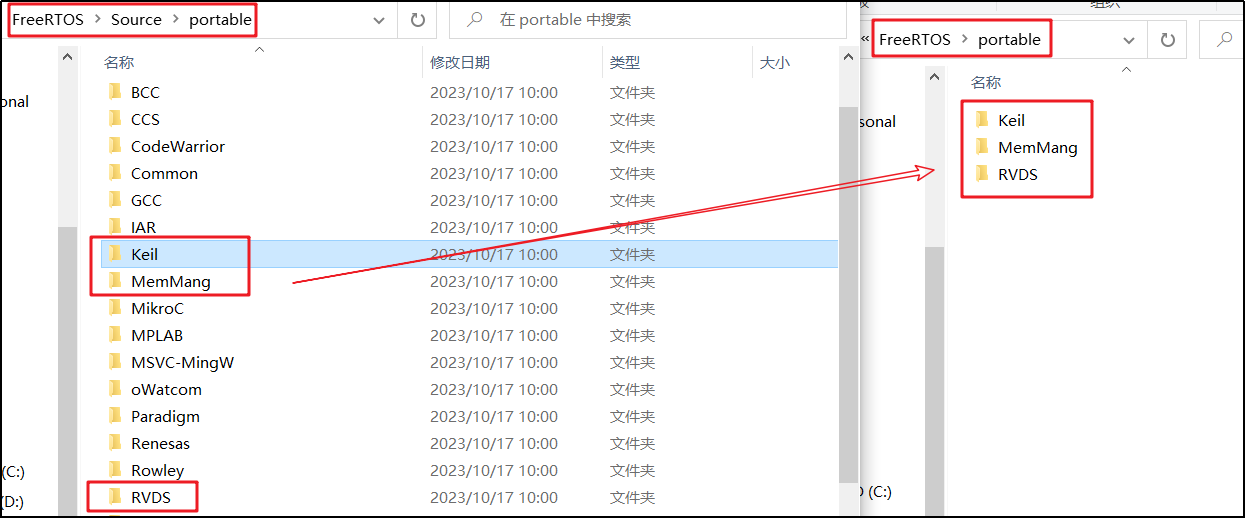
- portable文件夹结构
| 名称 | 描述 |
|---|---|
| Keil | 指向RVDS文件夹 |
| RVDS | 不同内核芯片的移植文件 |
| MemMang | 内存管理相关文件 |
Keil文件夹里只有一个See-also-the-RVDS-directory.txt,意思是让我们看RVDS文件夹。
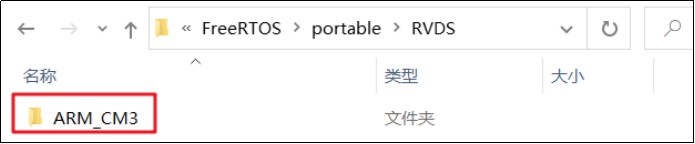
- RVDS文件夹
RVDS 文件夹包含了各种处理器相关的文件夹,FreeRTOS 是一个软件,单片机是一个硬件,FreeRTOS 要想运行在一个单片机上面,它们就必须关联在一起。
关联还是得通过写代码来关联,这部分关联的文件叫接口文件,通常由汇编和 C 联合编写。这些接口文件都是跟硬件密切相关的,不同的硬件接口文件是不一样的,但都大同小异。编写这些接口文件的过程我们就叫移植,移植的过程通常由 FreeRTOS 和 mcu 原厂的人来负责,移植好的这些接口文件就放在 RVDS 这个文件夹的目录下。
FreeRTOS 为我们提供了 cortex-m0、m3、m4 和 m7 等内核的单片机的接口文件,根据mcu的内核选择对应的接口文件即可。其实准确来说,不能够叫移植,应该叫使用官方的移植, 因为这些跟硬件相关的接口文件,RTOS 官方都已经写好了,我们只是使用而已。

以 ARM_CM3 这个文件夹为例,里面只有port.c与portmacro.h 两个文件
其中port.c文件:
里面的内容是由 FreeRTOS 官方的技术人员为 Cortex-M3 内核的处理器写的接口文件,里面核心的上下文切换代码是由汇编语言编写而成,对技术员的要求比较高,我们只是使用的话只需拷贝过来用即可。
其中portmacro.h文件:
port.c文件对应的头文件,主要是一些数据类型和宏定义。
- MemMang文件夹
MemMang 文件夹下存放的是跟内存管理相关的,总共有五个 heap 文件以及一个 readme 说明文件。
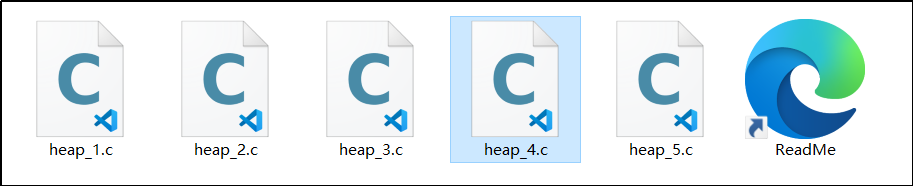
这五个 heap 文件在移植的时候必须使用一个,因为 FreeRTOS 在创建内核对象的时候使用的是动态分配内存,而这些动态内存分配的函数则在这几个文件里面实现,不同的分配算法会导致不同的效率与结果,后面在内存管理中我们会讲解每个文件的区别,由于现在是初学,所以我们选用 heap4.c 即可。
3.3 移植流程(需要自己有一个原始模板)
3.3.1 目录添加源代码文件
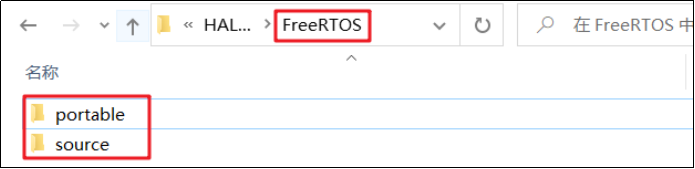
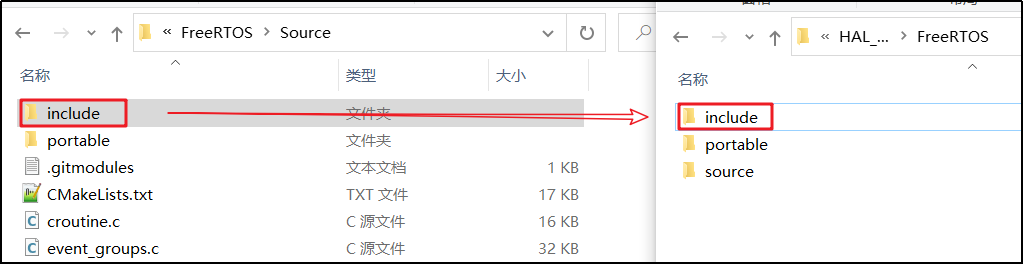
在原始例程的根路径下,创建FreeRTOS文件夹,并且往里面新建portable和source文件夹
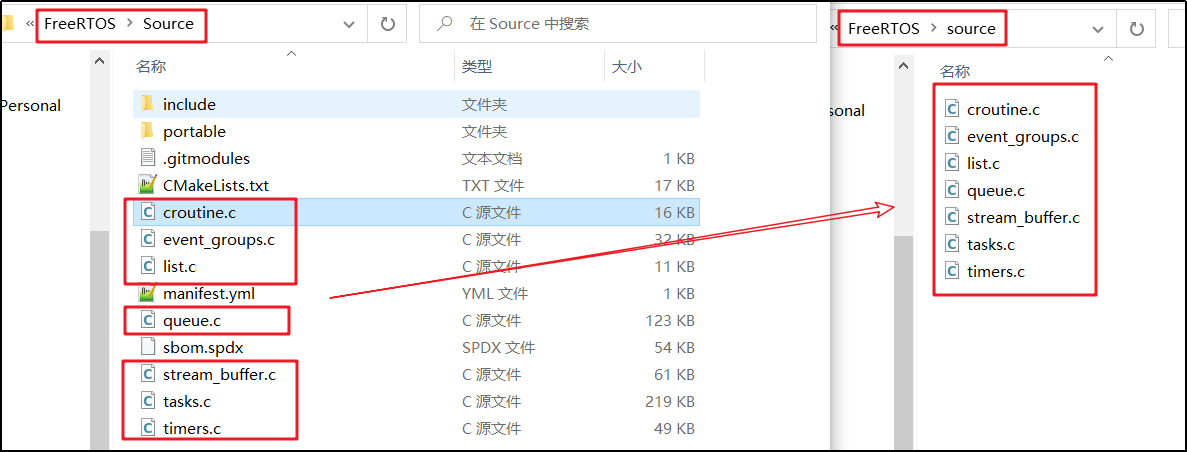
拷贝FreeRTOS源码的Source文件夹的7个.c文件到例程的source文件夹。
拷贝FreeRTOS源码portable文件夹下的Keil、RVDS、MemMang到例程的portable文件夹下。
其中例程的MemMang可只保留heap_4.c
RVDS文件夹下要保留当前使用芯片所对应的内核(STM32F103就是CM3内核的)
拷贝FreeRTOS源码include文件夹到例程的FreeRTOS文件夹下。
FreeRTOSConfig.h文件是对FreeRTOS系统进行配置的一个头文件,需要自己创建,这里在FreeRTOS文件夹下的include文件夹中创建,内容建议直接复制以下:
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/* 公共头文件*/
#include "system.h"
#include "myusart.h"
#include "stm32f10x.h"
extern uint32_t SystemCoreClock;
/* 基础配置项 */
#define configUSE_PREEMPTION 1 /* 1: 抢占式调度器, 0: 协程式调度器, 无默认需定义 */
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1 /* 1: 使用硬件计算下一个要运行的任务, 0: 使用软件算法计算下一个要运行的任务, 默认: 0 */
#define configUSE_TICKLESS_IDLE 0 /* 1: 使能tickless低功耗模式, 默认: 0 */
#define configCPU_CLOCK_HZ SystemCoreClock /* 定义CPU主频, 单位: Hz, 无默认需定义 */
//#define configSYSTICK_CLOCK_HZ (configCPU_CLOCK_HZ / 8)/* 定义SysTick时钟频率,当SysTick时钟频率与内核时钟频率不同时才可以定义, 单位: Hz, 默认: 不定义 */
#define configTICK_RATE_HZ 1000 /* 定义系统时钟节拍频率, 单位: Hz, 无默认需定义 */
#define configMAX_PRIORITIES 32 /* 定义最大优先级数, 最大优先级=configMAX_PRIORITIES-1, 无默认需定义 */
#define configMINIMAL_STACK_SIZE 128 /* 定义空闲任务的栈空间大小, 单位: Word, 无默认需定义 */
#define configMAX_TASK_NAME_LEN 16 /* 定义任务名最大字符数, 默认: 16 */
#define configUSE_16_BIT_TICKS 0 /* 1: 定义系统时钟节拍计数器的数据类型为16位无符号数, 无默认需定义 */
#define configIDLE_SHOULD_YIELD 1 /* 1: 使能在抢占式调度下,同优先级的任务能抢占空闲任务, 默认: 1 */
#define configUSE_TASK_NOTIFICATIONS 1 /* 1: 使能任务间直接的消息传递,包括信号量、事件标志组和消息邮箱, 默认: 1 */
#define configTASK_NOTIFICATION_ARRAY_ENTRIES 1 /* 定义任务通知数组的大小, 默认: 1 */
#define configUSE_MUTEXES 1 /* 1: 使能互斥信号量, 默认: 0 */
#define configUSE_RECURSIVE_MUTEXES 1 /* 1: 使能递归互斥信号量, 默认: 0 */
#define configUSE_COUNTING_SEMAPHORES 1 /* 1: 使能计数信号量, 默认: 0 */
#define configUSE_ALTERNATIVE_API 0 /* 已弃用!!! */
#define configQUEUE_REGISTRY_SIZE 8 /* 定义可以注册的信号量和消息队列的个数, 默认: 0 */
#define configUSE_QUEUE_SETS 1 /* 1: 使能队列集, 默认: 0 */
#define configUSE_TIME_SLICING 1 /* 1: 使能时间片调度, 默认: 1 */
#define configUSE_NEWLIB_REENTRANT 0 /* 1: 任务创建时分配Newlib的重入结构体, 默认: 0 */
#define configENABLE_BACKWARD_COMPATIBILITY 0 /* 1: 使能兼容老版本, 默认: 1 */
#define configNUM_THREAD_LOCAL_STORAGE_POINTERS 0 /* 定义线程本地存储指针的个数, 默认: 0 */
#define configSTACK_DEPTH_TYPE uint16_t /* 定义任务堆栈深度的数据类型, 默认: uint16_t */
#define configMESSAGE_BUFFER_LENGTH_TYPE size_t /* 定义消息缓冲区中消息长度的数据类型, 默认: size_t */
/* 内存分配相关定义 */
#define configSUPPORT_STATIC_ALLOCATION 0 /* 1: 支持静态申请内存, 默认: 0 */
#define configSUPPORT_DYNAMIC_ALLOCATION 1 /* 1: 支持动态申请内存, 默认: 1 */
#define configTOTAL_HEAP_SIZE ((size_t)(10 * 1024)) /* FreeRTOS堆中可用的RAM总量, 单位: Byte, 无默认需定义 */
#define configAPPLICATION_ALLOCATED_HEAP 0 /* 1: 用户手动分配FreeRTOS内存堆(ucHeap), 默认: 0 */
#define configSTACK_ALLOCATION_FROM_SEPARATE_HEAP 0 /* 1: 用户自行实现任务创建时使用的内存申请与释放函数, 默认: 0 */
/* 钩子函数相关定义 */
#define configUSE_IDLE_HOOK 0 /* 1: 使能空闲任务钩子函数, 无默认需定义 */
#define configUSE_TICK_HOOK 0 /* 1: 使能系统时钟节拍中断钩子函数, 无默认需定义 */
#define configCHECK_FOR_STACK_OVERFLOW 0 /* 1: 使能栈溢出检测方法1, 2: 使能栈溢出检测方法2, 默认: 0 */
#define configUSE_MALLOC_FAILED_HOOK 0 /* 1: 使能动态内存申请失败钩子函数, 默认: 0 */
#define configUSE_DAEMON_TASK_STARTUP_HOOK 0 /* 1: 使能定时器服务任务首次执行前的钩子函数, 默认: 0 */
/* 运行时间和任务状态统计相关定义 */
#define configGENERATE_RUN_TIME_STATS 0 /* 1: 使能任务运行时间统计功能, 默认: 0 */
#if configGENERATE_RUN_TIME_STATS
#include "./BSP/TIMER/btim.h"
#define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() ConfigureTimeForRunTimeStats()
extern uint32_t FreeRTOSRunTimeTicks;
#define portGET_RUN_TIME_COUNTER_VALUE() FreeRTOSRunTimeTicks
#endif
#define configUSE_TRACE_FACILITY 1 /* 1: 使能可视化跟踪调试, 默认: 0 */
#define configUSE_STATS_FORMATTING_FUNCTIONS 1 /* 1: configUSE_TRACE_FACILITY为1时,会编译vTaskList()和vTaskGetRunTimeStats()函数, 默认: 0 */
/* 协程相关定义 */
#define configUSE_CO_ROUTINES 0 /* 1: 启用协程, 默认: 0 */
#define configMAX_CO_ROUTINE_PRIORITIES 2 /* 定义协程的最大优先级, 最大优先级=configMAX_CO_ROUTINE_PRIORITIES-1, 无默认configUSE_CO_ROUTINES为1时需定义 */
/* 软件定时器相关定义 */
#define configUSE_TIMERS 1 /* 1: 使能软件定时器, 默认: 0 */
#define configTIMER_TASK_PRIORITY ( configMAX_PRIORITIES - 1 ) /* 定义软件定时器任务的优先级, 无默认configUSE_TIMERS为1时需定义 */
#define configTIMER_QUEUE_LENGTH 5 /* 定义软件定时器命令队列的长度, 无默认configUSE_TIMERS为1时需定义 */
#define configTIMER_TASK_STACK_DEPTH ( configMINIMAL_STACK_SIZE * 2) /* 定义软件定时器任务的栈空间大小, 无默认configUSE_TIMERS为1时需定义 */
/* 可选函数, 1: 使能 */
#define INCLUDE_vTaskPrioritySet 1 /* 设置任务优先级 */
#define INCLUDE_uxTaskPriorityGet 1 /* 获取任务优先级 */
#define INCLUDE_vTaskDelete 1 /* 删除任务 */
#define INCLUDE_vTaskSuspend 1 /* 挂起任务 */
#define INCLUDE_xResumeFromISR 1 /* 恢复在中断中挂起的任务 */
#define INCLUDE_vTaskDelayUntil 1 /* 任务绝对延时 */
#define INCLUDE_vTaskDelay 1 /* 任务延时 */
#define INCLUDE_xTaskGetSchedulerState 1 /* 获取任务调度器状态 */
#define INCLUDE_xTaskGetCurrentTaskHandle 1 /* 获取当前任务的任务句柄 */
#define INCLUDE_uxTaskGetStackHighWaterMark 1 /* 获取任务堆栈历史剩余最小值 */
#define INCLUDE_xTaskGetIdleTaskHandle 1 /* 获取空闲任务的任务句柄 */
#define INCLUDE_eTaskGetState 1 /* 获取任务状态 */
#define INCLUDE_xEventGroupSetBitFromISR 1 /* 在中断中设置事件标志位 */
#define INCLUDE_xTimerPendFunctionCall 1 /* 将函数的执行挂到定时器服务任务 */
#define INCLUDE_xTaskAbortDelay 1 /* 中断任务延时 */
#define INCLUDE_xTaskGetHandle 1 /* 通过任务名获取任务句柄 */
#define INCLUDE_xTaskResumeFromISR 1 /* 恢复在中断中挂起的任务 */
/* 中断嵌套行为配置 */
#ifdef __NVIC_PRIO_BITS
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4
#endif
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 /* 中断最低优先级 */
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5 /* FreeRTOS可管理的最高中断优先级 */
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
#define configMAX_API_CALL_INTERRUPT_PRIORITY configMAX_SYSCALL_INTERRUPT_PRIORITY
/* FreeRTOS中断服务函数相关定义 */
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
/* 断言 */
#define vAssertCalled(char, int) printf("Error: %s, %d\r\n", char, int)
#define configASSERT( x ) if( ( x ) == 0 ) vAssertCalled( __FILE__, __LINE__ )
/* FreeRTOS MPU 特殊定义 */
//#define configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS 0
//#define configTOTAL_MPU_REGIONS 8
//#define configTEX_S_C_B_FLASH 0x07UL
//#define configTEX_S_C_B_SRAM 0x07UL
//#define configENFORCE_SYSTEM_CALLS_FROM_KERNEL_ONLY 1
//#define configALLOW_UNPRIVILEGED_CRITICAL_SECTIONS 1
/* ARMv8-M 安全侧端口相关定义。 */
//#define secureconfigMAX_SECURE_CONTEXTS 5
#endif /* FREERTOS_CONFIG_H */
3.3.2 工程添加源码文件
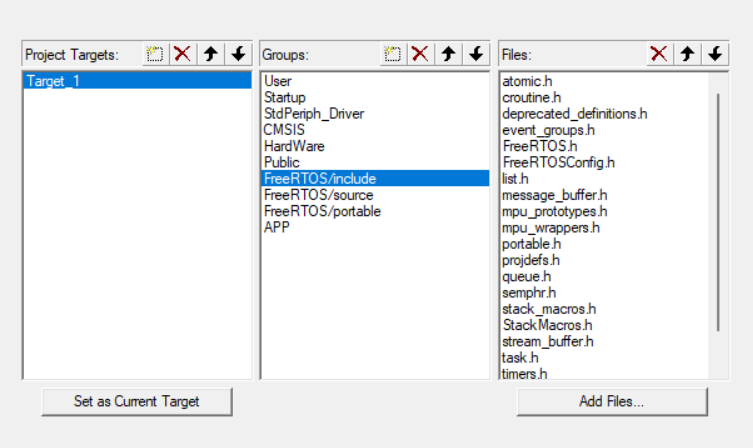
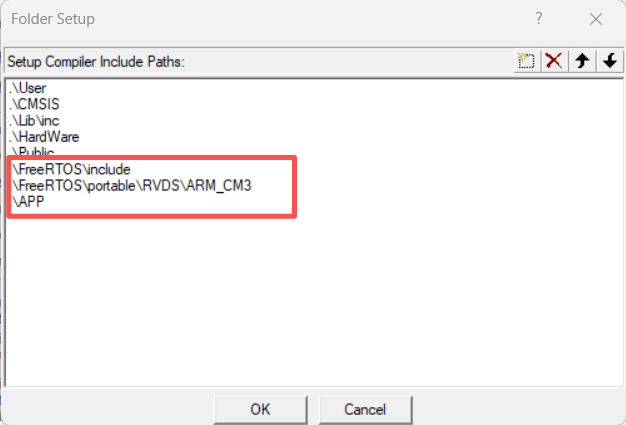
工程配置中添加如下四个新文件夹,其中APP文件夹是实际的业务代码文件
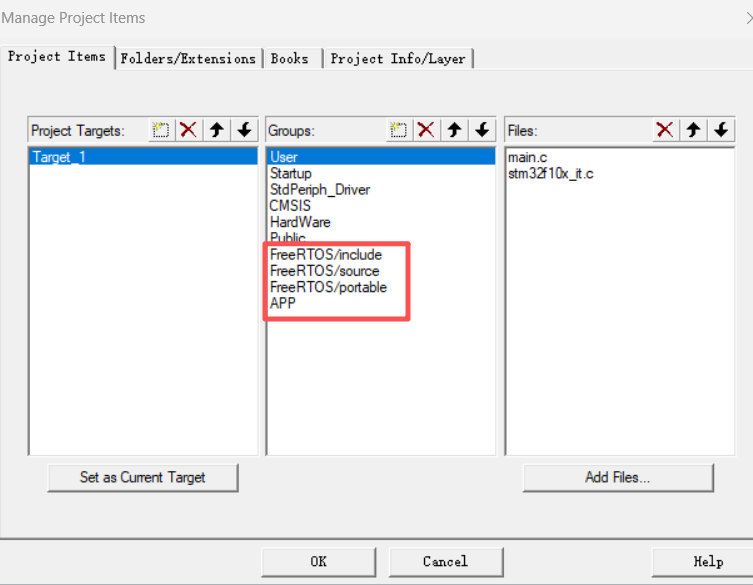
FreeRTOS/include目录中添加所有FreeRTOS文件夹下的include文件夹所有内容
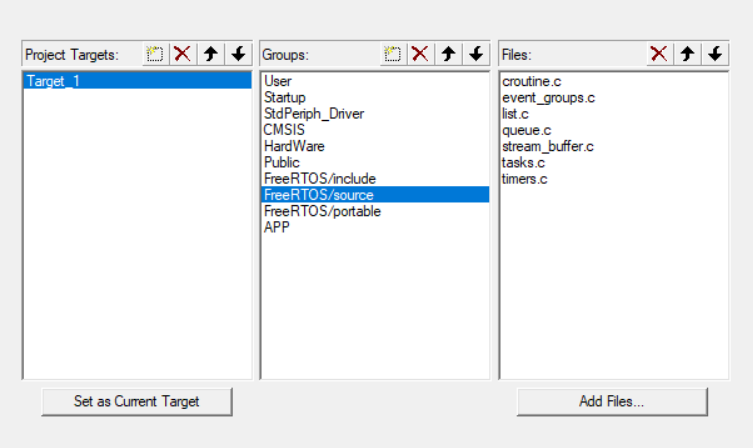
FreeRTOS/source目录中添加如下内容,文件来自于FreeRTOS文件夹下的source文件夹
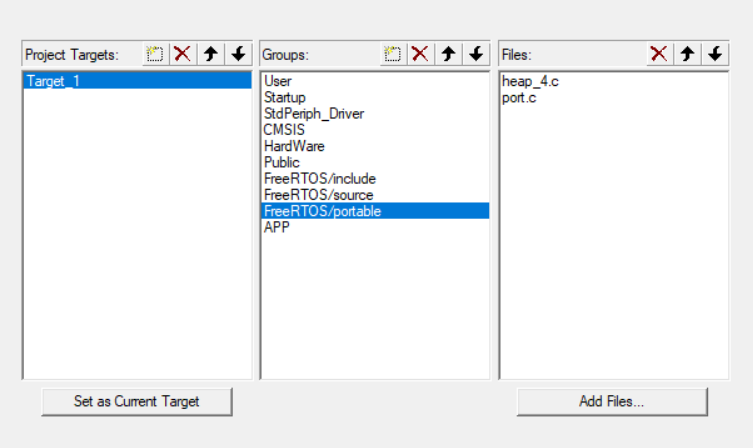
FreeRTOS/portable目录中添加如下内容,文件来自于FreeRTOS文件夹下的portable文件夹
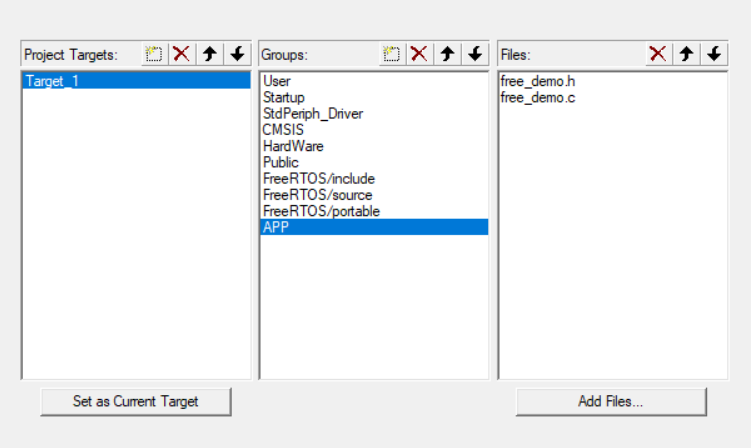
APP目录中添加如下内容(主要就是自定义的业务逻辑文件)
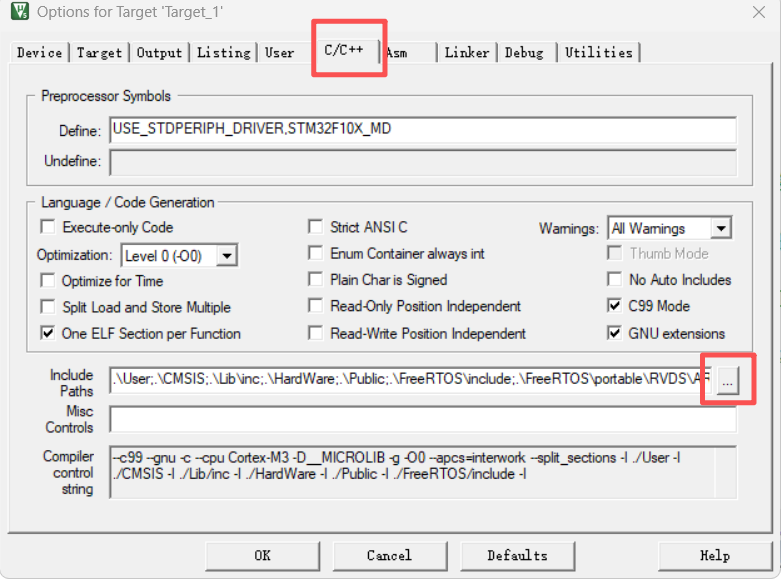
以上内容添加好后,为了防止编译时找不到对应的头文件,还需要添加头文件所在的路径

3.3.3 编译报错修复
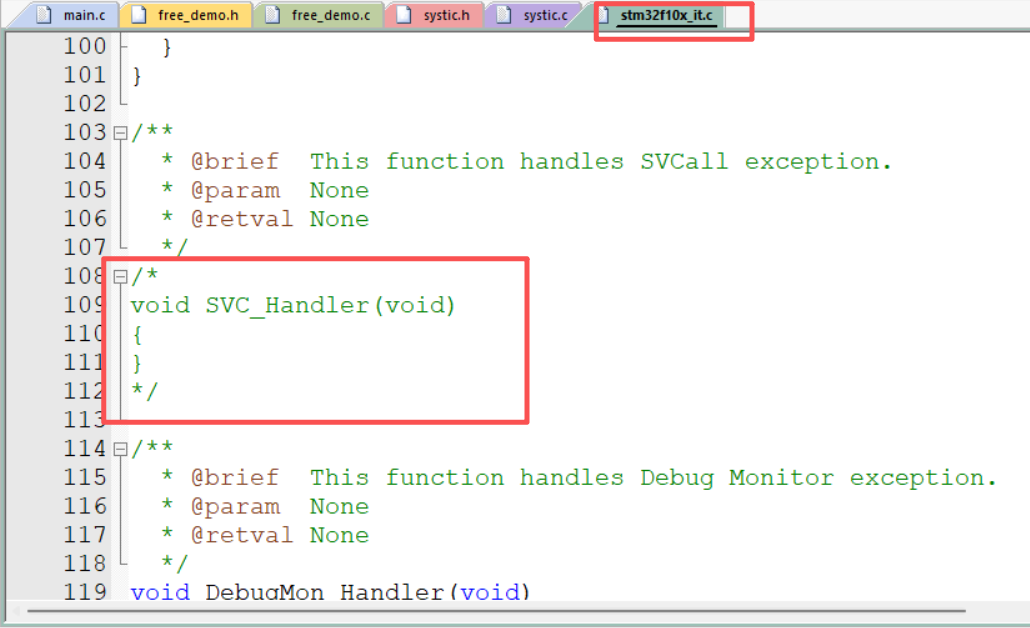
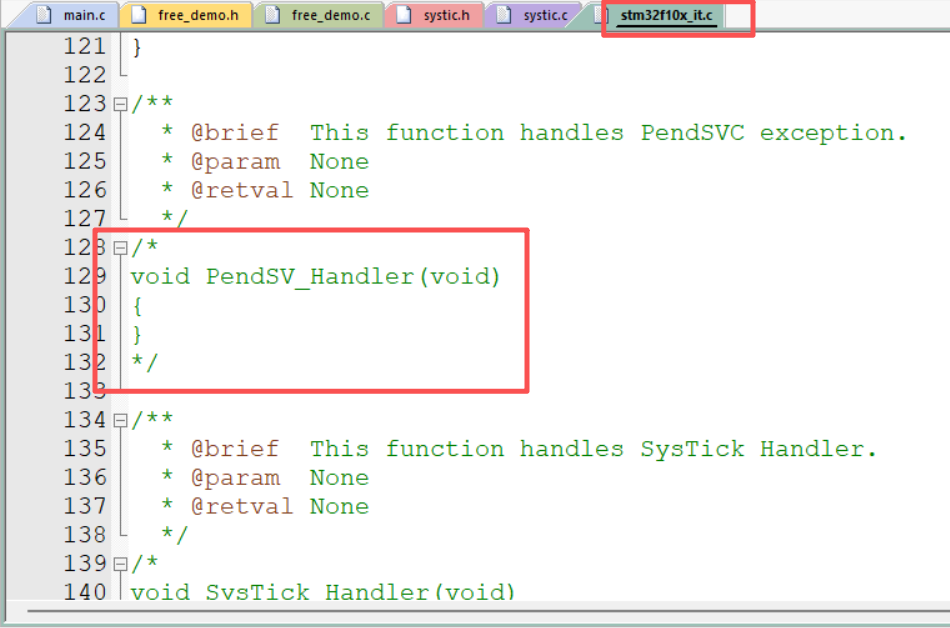
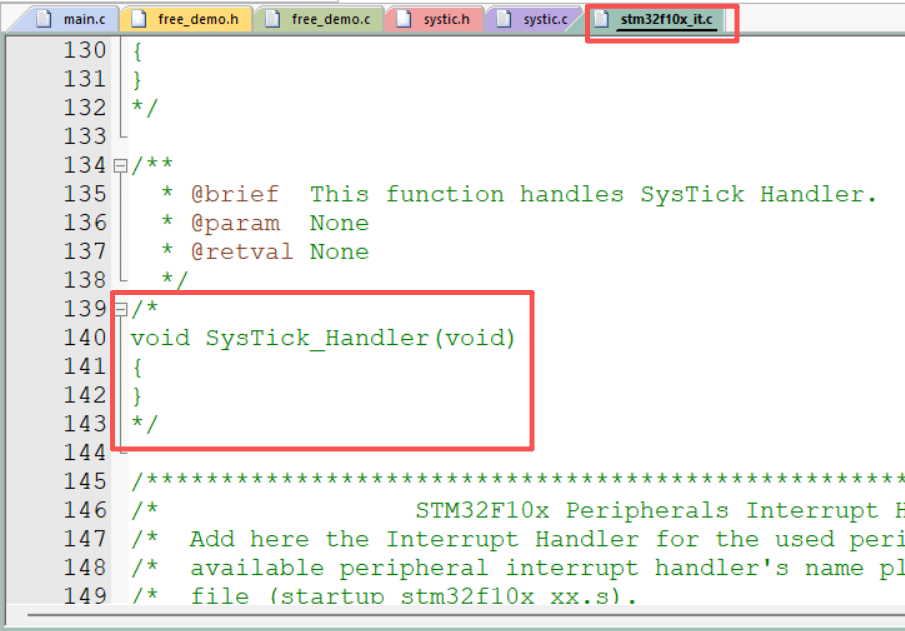
编译一次会有报错,如果前面配置的正常现在应该会是这个错误:

解决方法:
找到这个stm32f10x_it.c里面三个空函数注释掉
如果出现这些错误:

说明没有创建FreeRTOSConfig.h文件且没有正确配置头文件路径

说明没有将ARM_CM3文件夹配置到头文件路径中
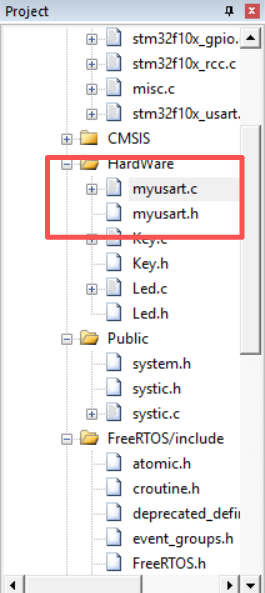
编译如果还有报错,如说没有找到myusart.h文件
解决方法:
把自己的串口相关代码修改一下文件名称即可,例如我这里原来是Usart1.c和Usart1.h
3.3.4 自定义嘀嗒时钟相关代码
我这里是创建在Public目录下的,位置不是很重要
主要原因是FreeRTOS中延时函数要参考的时钟标准不同,这里需要单独定义(主要就是将时钟的周期直接用系统主频计算,原来的方式可能需要对72Mhz分频,这里是直接用72Mhz计算),配置完成后系统中断周期是1ms,也就是说系统任务的轮换时间片是1ms
建议直接复制以下内容:
头文件systick.h:
#ifndef __SYSTICK_H
#define __SYSTICK_H
#include "stdint.h"
void systick_init();
void delay_us(uint32_t us);
void delay_ms(uint32_t ms);
#endif
源文件systick.c:
#include "stm32f10x.h" // Device header
#include "systick.h"
#include "FreeRTOS.h"
#include "task.h"
extern void xPortSysTickHandler(void);
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
xPortSysTickHandler();
}
}
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数
void systick_init()
{
u32 reload;
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);
fac_us=SystemCoreClock/1000000; //系统还没运行,以Systick计时
reload=SystemCoreClock/configTICK_RATE_HZ; //configTICK_RATE_HZ=1000
fac_ms=1000/configTICK_RATE_HZ; //系统已经运行,这就是个节拍数,用于给系统提供的延迟函数
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk;//开启SYSTICK中断
SysTick->LOAD=reload; //每1/configTICK_RATE_HZ断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
}
//延迟us,不会引起任务切换
//注意:nus的值,不要大于23860929us(最大值即2^32/fac_us@fac_us=180)
void delay_us(uint32_t nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
}
}
//延时nms,其实就是对会vTaskDelay的简单封装,会引起任务调度
//nms:要延时的ms数
//nms:0~65535
void delay_ms(uint32_t nms)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
if(nms>=fac_ms) //延时的时间大于OS的最少时间周期
{
vTaskDelay(nms); //FreeRTOS延时:vTaskDelay演示固定的时钟节拍,由于前面设定了频率为1000HZ,所以一个节拍就是1ms
}
nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时
}
然后再编译一次,如果没有错误(警告可以忽略,大部分都是最后一行没有新行这样的警告),移植其实就算完成了
4. 使用
4.1 APP文件夹相关内容
前面创建的APP文件夹是用来放freeRTOS要执行的业务代码的,文件夹名不重要
头文件freeRTOS_demo.h内容:
这里的freeRTOS_Start函数就是整个系统的入口函数
源文件freeRTOS_demo.c内容:
#include "stm32f10x.h" // Device header
#include "freeRTOS_demo.h"
#include "myusart.h"
#include "FreeRTOS.h"
#include "task.h"
TaskHandle_t start_task_Handler;
TaskHandle_t task1_Handler;
TaskHandle_t task2_Handler;
TaskHandle_t task3_Handler;
void start_Task(void *param);
void Task1(void *param);
void Task2(void *param);
void Task3(void *param);
void freeRTOS_Start(void)
{
BaseType_t res = xTaskCreate(start_Task ,"create_allTasks" ,256 ,NULL ,2 ,&start_task_Handler);
if(res == pdPASS)
{
Usart1_printf("startTask_create success \r\n");
}
vTaskStartScheduler();
}
void start_Task(void *param)
{
taskENTER_CRITICAL();
xTaskCreate(Task1 ,"myTask1" ,256 ,NULL ,2 ,&task1_Handler);
xTaskCreate(Task2 ,"myTask2" ,256 ,NULL ,2 ,&task2_Handler);
xTaskCreate(Task3 ,"myTask3" ,256 ,NULL ,2 ,&task3_Handler);
vTaskDelete(NULL);
taskEXIT_CRITICAL();
}
void Task1(void *param)
{
}
void Task2(void *param)
{
}
void Task3(void *param)
{
}
4.2 源代码解释
4.2.1 初始任务
freeRTOS中去轮流运行各个要执行的任务的,而这些任务是自己创建的
整体结构上,需要先创建一个初始任务,该任务的作用就是用来创建其他任务
创建任务的函数:xTaskCreate(任务要执行的函数,任务描述,任务所占用的栈大小,传给任务函数的参数,任务的优先级,任务句柄的地址);
函数的具体解释可以查看官方文档或者询问AI,这里不过多赘述
//初始任务的句柄
TaskHandle_t start_task_Handler;
//初始任务声明
void start_Task(void *param);
void freeRTOS_Start(void)
{
//创建初始任务
BaseType_t res = xTaskCreate(start_Task ,"create_allTasks" ,256 ,NULL ,2 ,&start_task_Handler);
//判断是否创建完成
if(res == pdPASS)
{
Usart1_printf("startTask_create success \r\n");
}
//开启任务调度
vTaskStartScheduler();
}
创建好任务并判断是否创建完成后,必须开启任务调度vTaskStartScheduler(),否则系统会只执行这个初始任务
初始任务的参数列表必须要和上面示例的一致,因为创建时有一个向该函数传递参数的步骤,所以不能为void
这里面说的“句柄”,可以简单理解为一个指向这个任务的指针,通过这个指针可以获取到这个任务的相关信息,不用深究
4.2.2 业务逻辑任务
业务逻辑任务由初始任务进行创建
//业务逻辑任务的句柄
TaskHandle_t task1_Handler;
TaskHandle_t task2_Handler;
TaskHandle_t task3_Handler;
//业务逻辑任务的声明
void Task1(void *param);
void Task2(void *param);
void Task3(void *param);
//初始任务的实现
void start_Task(void *param)
{
//进入代码临界区
taskENTER_CRITICAL();
xTaskCreate(Task1 ,"myTask1" ,256 ,NULL ,2 ,&task1_Handler);
xTaskCreate(Task2 ,"myTask2" ,256 ,NULL ,2 ,&task2_Handler);
xTaskCreate(Task3 ,"myTask3" ,256 ,NULL ,2 ,&task3_Handler);
//将业务逻辑任务创建完毕就删除自身任务,不用再运行,防止业务逻辑任务多次被创建
vTaskDelete(NULL);
//退出代码临界区
taskEXIT_CRITICAL();
}
//业务逻辑函数实现(示例)
void Task1(void *param)
{
}
void Task2(void *param)
{
}
void Task3(void *param)
{
}
上面所谓的“代码临界区”,由于系统会不断切换任务,这里初始任务主要目的就是创建其他业务逻辑任务,因此最好是一次都创建好然后再切换,防止创建到一半就切换,主要使用的就是taskENTER_CRITICAL();和taskEXIT_CRITICAL();函数
4.2.3 main函数
main函数中不需要使用死循环,内容参考以下即可:
#include "stm32f10x.h"
#include "systic.h"
#include "myusart.h"
#include "free_demo.h"
int main()
{
systick_init();
//硬件外设初始化,比如LED之类的
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Usart1_Init(115200);
//必须添加
freeRTOS_Start();
}
4.2.4 简单示例
任务1:LED1闪烁,周期为0.5s
任务2:LED2闪烁,周期为0.5s
任务3:如果按键1按下,则删除任务1
freeRTOS_demo.c中的代码(LED和按键的设置仅供参考,具体IO配置需要结合实际板子资源):
#include "stm32f10x.h" // Device header
#include "myusart.h"
#include "Led.h"
#include "Key.h"
#include "freeRTOS_demo.h"
#include "FreeRTOS.h"
#include "task.h"//包含创建、挂起、恢复、删除任务
TaskHandle_t start_mytask_Handler;
TaskHandle_t myTask1_Handler;
TaskHandle_t myTask2_Handler;
TaskHandle_t myTask3_Handler;
void start_mytask(void *param);
void myTask1(void *param);
void myTask2(void *param);
void myTask3(void *param);
void freeRTOS_start(void)
{
//初始任务为创建其他任务
BaseType_t res = xTaskCreate(
//任务函数
start_mytask,
//任务描述
"create_allTasks",
//任务所分配的堆栈字数
256,
//给任务传递的参数
NULL,
//任务执行优先级,数字越大优先级越高
2,
//任务的句柄
&start_mytask_Handler
);
if(res == pdPASS)
{
Usart1_printf("start Task create Success");
}
//任务调度
vTaskStartScheduler();
}
void start_mytask(void *param)
{
//三个子任务都创建完毕后再运行
taskENTER_CRITICAL();
//task1:led1闪烁
xTaskCreate(myTask1 ,"Led1" ,256 ,NULL ,2 ,&myTask1_Handler);
//task2:led2闪烁
xTaskCreate(myTask2 ,"Led2" ,256 ,NULL ,2 ,&myTask2_Handler);
//task3:key检测
xTaskCreate(myTask3 ,"Led3" ,256 ,NULL ,2 ,&myTask3_Handler);
//创建完成后删除自己
vTaskDelete(NULL);
taskEXIT_CRITICAL();
}
void myTask1(void *param)
{
while(1)
{
Led_On(LED1);
vTaskDelay(500);
Led_Off(LED1);
vTaskDelay(500);
}
}
void myTask2(void *param)
{
while(1)
{
Led_On(LED2);
vTaskDelay(500);
Led_Off(LED2);
vTaskDelay(500);
}
}
void myTask3(void *param)
{
uint8_t KeyNum = 0;
while(1)
{
KeyNum = get_KeyNum();
if(KeyNum == 1)
{
vTaskDelete(myTask1_Handler);
}
}
}
main.c内容:
#include "stm32f10x.h"
#include "systic.h"
#include "myusart.h"
#include "Key.h"
#include "Led.h"
#include "freeRTOS_demo.h"
int main()
{
systick_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Usart1_Init(115200);
Key_Init();
Led_Init();
freeRTOS_start();
//return 0;
}
附:
led.c内容:
#include "stm32f10x.h" // Device header
#include "Led.h"
void Led_Init(void)
{
//PA0-PA7 低电平触发
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA ,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 |GPIO_Pin_2 |GPIO_Pin_3 |GPIO_Pin_4 |GPIO_Pin_5 |GPIO_Pin_6 |GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA ,&GPIO_InitStructure);
//初始默认关闭
GPIO_SetBits(GPIOA ,GPIO_Pin_0);
GPIO_SetBits(GPIOA ,GPIO_Pin_1);
GPIO_SetBits(GPIOA ,GPIO_Pin_2);
GPIO_SetBits(GPIOA ,GPIO_Pin_3);
GPIO_SetBits(GPIOA ,GPIO_Pin_4);
GPIO_SetBits(GPIOA ,GPIO_Pin_5);
GPIO_SetBits(GPIOA ,GPIO_Pin_6);
GPIO_SetBits(GPIOA ,GPIO_Pin_7);
}
uint8_t getLedState(uint8_t Led_Num)
{
switch(Led_Num)
{
case LED1:
return GPIO_ReadOutputDataBit(GPIOA ,GPIO_Pin_0);
case LED2:
return GPIO_ReadOutputDataBit(GPIOA ,GPIO_Pin_1);
case LED3:
return GPIO_ReadOutputDataBit(GPIOA ,GPIO_Pin_2);
case LED4:
return GPIO_ReadOutputDataBit(GPIOA ,GPIO_Pin_3);
case LED5:
return GPIO_ReadOutputDataBit(GPIOA ,GPIO_Pin_4);
case LED6:
return GPIO_ReadOutputDataBit(GPIOA ,GPIO_Pin_5);
case LED7:
return GPIO_ReadOutputDataBit(GPIOA ,GPIO_Pin_6);
case LED8:
return GPIO_ReadOutputDataBit(GPIOA ,GPIO_Pin_7);
}
}
void Led_On(uint8_t Led_Num)
{
switch(Led_Num)
{
case LED1:
GPIO_ResetBits(GPIOA ,GPIO_Pin_0);
break;
case LED2:
GPIO_ResetBits(GPIOA ,GPIO_Pin_1);
break;
case LED3:
GPIO_ResetBits(GPIOA ,GPIO_Pin_2);
break;
case LED4:
GPIO_ResetBits(GPIOA ,GPIO_Pin_3);
break;
case LED5:
GPIO_ResetBits(GPIOA ,GPIO_Pin_4);
break;
case LED6:
GPIO_ResetBits(GPIOA ,GPIO_Pin_5);
break;
case LED7:
GPIO_ResetBits(GPIOA ,GPIO_Pin_6);
break;
case LED8:
GPIO_ResetBits(GPIOA ,GPIO_Pin_7);
break;
}
}
void Led_Off(uint8_t Led_Num)
{
switch(Led_Num)
{
case LED1:
GPIO_SetBits(GPIOA ,GPIO_Pin_0);
break;
case LED2:
GPIO_SetBits(GPIOA ,GPIO_Pin_1);
break;
case LED3:
GPIO_SetBits(GPIOA ,GPIO_Pin_2);
break;
case LED4:
GPIO_SetBits(GPIOA ,GPIO_Pin_3);
break;
case LED5:
GPIO_SetBits(GPIOA ,GPIO_Pin_4);
break;
case LED6:
GPIO_SetBits(GPIOA ,GPIO_Pin_5);
break;
case LED7:
GPIO_SetBits(GPIOA ,GPIO_Pin_6);
break;
case LED8:
GPIO_SetBits(GPIOA ,GPIO_Pin_7);
break;
}
}
附:
key.c内容:
#include "stm32f10x.h" // Device header
#include "Key.h"
#include "systic.h"
//PA12-15 低电平有效
void Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA ,ENABLE);
//PA13和14是SWCLK SWDIO,需要使用普通GPIO模式需要关闭调试模式
//使能AFIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO ,ENABLE);
//关闭调试功能
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable ,ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable ,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 |GPIO_Pin_13 |GPIO_Pin_14 |GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA ,&GPIO_InitStructure);
}
uint8_t get_KeyNum(void)
{
uint8_t KeyNum = 0;
if(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_12) == 0)//按下
{
delay_us(20);
while(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_12) == 0);
delay_us(20);//松手消抖
if(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_12) == 1)
{
KeyNum = 1;
}
}
else if(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_13) == 0)
{
delay_us(20);
while(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_13) == 0)
delay_us(20);
if(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_13) == 1)
{
KeyNum = 2;
}
}
else if(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_14) == 0)
{
delay_us(20);
while(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_14) == 0)
delay_us(20);
if(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_14) == 1)
{
KeyNum = 3;
}
}
else if(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_15) == 0)
{
delay_us(20);
while(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_15) == 0)
delay_us(20);
if(GPIO_ReadInputDataBit(GPIOA ,GPIO_Pin_15) == 1)
{
KeyNum = 4;
}
}
return KeyNum;
}
附件
代码中使用到的串口打印函数Usart1_printf()具体实现如下,使用了C语言的可变参数,要使用可变参数必须包含头文件include "stdarg.h",具体知识点可以查询AI了解,关键点仅在于参数列表的使用流程
void Usart1_SendByte(uint16_t Byte)
{
USART_SendData(USART1 ,Byte);
while(USART_GetFlagStatus(USART1 ,USART_FLAG_TXE) == RESET);//等待发送完毕
}
void Usart1_SendString(char *string)
{
for(uint8_t i = 0; string[i] != '\0' ;i++)
{
Usart1_SendByte(string[i]);
}
}
//重写fputc使用原生printf编译出来很大,还需要依赖FILE,而且无法在中断中使用
void Usart1_printf(char* format,...)
{
char String[256];
//创建参数列表
va_list arg;
//绑定参数列表到传入的固定参数
va_start(arg ,format);
//重新拼接字符串 - >只有vsprintf才可以拼接可变参数,sprintf只能传入固定的参数
vsprintf(String ,format ,arg);
//清理参数列表
va_end(arg);
//串口发送
Usart1_SendString(String);
}
上面代码中提到“重写fputc”该方式是重写fputc函数以直接使用printf函数,实际中更多是使用自己定义的printf,如上方式